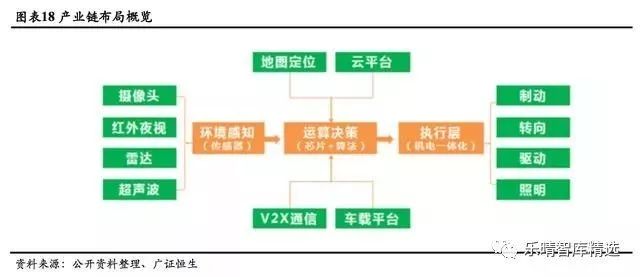
✿ღღ★、车载平台等车联网系统为汽车进行路况判断✿ღღ★,规划最优行驶路径✿ღღ★,起到决策作用✿ღღ★。
从执行层面看✿ღღ★,包括转向智能驾驶✿ღღ★、油门✿ღღ★、制动✿ღღ★、照明等执行部件与系统✿ღღ★,和整车应用✿ღღ★。现有汽车零部件供应商在执行层有许多积累✿ღღ★,通过研发新一代产品进行产品升级;而在感知和决策层✿ღღ★,国内传统零部件供应商参与较少✿ღღ★,更多是IT巨头和创业公司在该领域竞争凯发K8国际✿ღღ★。
目前感知层的传感器包括摄像头✿ღღ★、超声波雷达✿ღღ★、毫米波雷达和激光雷达等✿ღღ★,由于各有其优缺点和适用场景✿ღღ★,在提高汽车自动化等级的过程中✿ღღ★,多传感器的融合成为必然趋势✿ღღ★。
具体来说✿ღღ★,多传感器融合就是将多个传感器获取的数据✿ღღ★、信息集中在一起综合分析以便在各种环境下更加准备可靠的描述外界环境✿ღღ★,从而提高系统决策的正确性✿ღღ★,其中不仅需要硬件设备方面的协同配合✿ღღ★,还需要决策层算法等支持✿ღღ★。

L2级别下的自动驾驶汽车无需激光雷达✿ღღ★,但L3级别以上的自动驾驶汽车对激光雷达的分辨率和数量需求逐渐增加✿ღღ★,L5级别自动驾驶需要128线的激光雷达✿ღღ★,可以说如果激光雷达的发展不够理想✿ღღ★,自动驾驶等级的提高会收到很大的限制✿ღღ★。
目前激光雷达的技术不够发达✿ღღ★,生产成本高✿ღღ★。Velodyne研发的VLS-128虽然比HDL-64的尺寸缩小了70%✿ღღ★,探测距离提高了一倍✿ღღ★,分辨率则提高了四倍✿ღღ★,但其数量较少且价格高✿ღღ★。
激光雷达的原理是✿ღღ★,通过向外发射并接收的波束的方式来探测计算目标物体的位置和速度等信息✿ღღ★。它与毫米波雷达的最大区别在于✿ღღ★,激光雷达使用的是激光✿ღღ★,而毫米波雷达使用的是毫米波✿ღღ★。
激光雷达使用飞行时间技术✿ღღ★,即根据激光遇到障碍物后的折返时间间接计算目标与自己的相对距离✿ღღ★。
作为感知端的重要零部件✿ღღ★,激光雷达的发展影响着自动驾驶的应用场景✿ღღ★。激光雷达在自动驾驶技术中的应用主要是对装载物所在周围环境进行3D建模✿ღღ★,获得环境的深度信息✿ღღ★、识别障碍物✿ღღ★、规划路径✿ღღ★、以及进行环境测绘等等✿ღღ★。随着自动驾驶技术的进一步发展✿ღღ★,激光雷达作为主流传感器受益明确✿ღღ★。
先进的技术也意味着更高昂的成本✿ღღ★。与其他发展较成熟的摄像头✿ღღ★、毫米波雷达等传统传感器相比✿ღღ★,激光雷达仍是一个在不断变化中的技术✿ღღ★,也仍是一个量产难度较大的技术✿ღღ★,目前仍没有能够在技术和成本上完全满足车规要求的激光雷达✿ღღ★。
市面缺乏对传感器真正的行业标准胜者无敌✿ღღ★,技术难关加上高昂的成本加剧了量产的难度✿ღღ★,也让目前的市场价格更加居高不下✿ღღ★。但从各大车企对激光雷达企业的关注和自动驾驶发展对传感器的刚需可看出✿ღღ★,激光雷达市场方兴未艾✿ღღ★,在更成熟的量产计划实现后凯发K8✿ღღ★,✿ღღ★,激光雷达将迎来更大的市场✿ღღ★。
在激光雷达技术上美国✿ღღ★、德国✿ღღ★、以色列✿ღღ★、加拿大等国家走在全球前列✿ღღ★。据不完全统计✿ღღ★,国外激光雷达企业达到14家✿ღღ★。中国企业近年来奋起直追✿ღღ★,激光雷达企业已有8家✿ღღ★。
由于全世界的激光雷达布局汽车步伐仍处于起步阶段✿ღღ★,因此国内外技术进展相差并不大✿ღღ★,自主企业✿ღღ★、创新型企业有望通过技术研发获得市场先机✿ღღ★,占领市场✿ღღ★。
高精度地图是自动驾驶的核心技术之一✿ღღ★。和普通导航电子地图相对✿ღღ★,它是服务于自动驾驶系统的专题地图✿ღღ★,拥有精确的车辆位置信息和丰富的道路元素数据信息✿ღღ★,起到构建类似于人脑对于空间的整体记忆与认知的功能✿ღღ★,可以帮助汽车预知路面复杂信息✿ღღ★,如坡度✿ღღ★、曲率✿ღღ★、航向等✿ღღ★,是确保行车效率与安全✿ღღ★、规避潜在风险的信息来源和关键决策基础✿ღღ★。
高精度地图的高精度体现在两个方面✿ღღ★。一是高精度地图的绝对坐标精度更高✿ღღ★,地图上某个目标和真实世界的事物之间的精度更高;二是高精度地图所含有的道路交通信息元素更丰富和细致✿ღღ★。
高精度地图主要有以下三大功能:地图匹配✿ღღ★、辅助环境感知和路径规划✿ღღ★。高精度地图将车辆位置精准的定位于车道之上✿ღღ★、帮助车辆获取更为准确有效全面的当前位置交通状况并为无人车规划制定最优路线✿ღღ★。
一方面是大型互联网科技巨头✿ღღ★、车企✿ღღ★,如谷歌✿ღღ★、英特尔✿ღღ★、宝马等✿ღღ★。这些公司在高精密地图的研发上更多采取集中采集的地图信息搜集方式✿ღღ★,他们的合作伙伴数量相对而言更多而且更为稳定财经消息✿ღღ★,在市场上影响力更强✿ღღ★。
而另一方面是看准时间和角度切入自动驾驶行业的初创公司✿ღღ★,可以将其视作算法集成层面的公司✿ღღ★。
由于国外特别是美国在地理信息采集上政策监管较松✿ღღ★,因此有不少初创公司都在美国开启了高精度地图的研发与应用试验凯发K8国际娱乐官网✿ღღ★,✿ღღ★。他们利用高精度地图进行路线规划胜者无敌✿ღღ★,采用新型计算平台✿ღღ★,整合多传感器信息✿ღღ★,开发相应的车辆控制算法对汽车进行行为控制✿ღღ★。对于大部分初创企业而言✿ღღ★,项目能否真正产生正的现金流事关自身生死存亡✿ღღ★。
因此此类公司使用的信息采集方式基本均为成本较低的众包采集✿ღღ★,并且在商业化模式探索方面不断做出积极的尝试✿ღღ★。
虽然目前高精度地图的商业化未来依旧并不明朗✿ღღ★,但是此类公司的做法✿ღღ★,例如Carmera的高精度地图服务工程测量✿ღღ★、城市规划✿ღღ★,DeepMap为合作伙伴开发的云端服务平台等依旧具有一定的借鉴意义✿ღღ★。
国内的高精度地图竞争格局与国外类似✿ღღ★,可以分为老牌地图服务商(如高德地图✿ღღ★、四维图新等)和挑战者(如宽凳科技✿ღღ★、星舆科技等)✿ღღ★。
前者都拥有导航电子地图制作甲级资质✿ღღ★,采用集中制图和众包制图结合的方式研发高精度地图✿ღღ★。而后者仅有部分拿到了导航电子地图制作甲级资质✿ღღ★,未能拿到资质的企业则利用众包采集的高精度地图数据搜集方法✿ღღ★,绕开资质要求并独立展开高精度地图业务✿ღღ★。
此类企业可以通过提供高精度地图解决方案为客户排忧解难✿ღღ★,做差异化定位✿ღღ★,在国内的高精度地图市场也并非没有一席之地✿ღღ★。
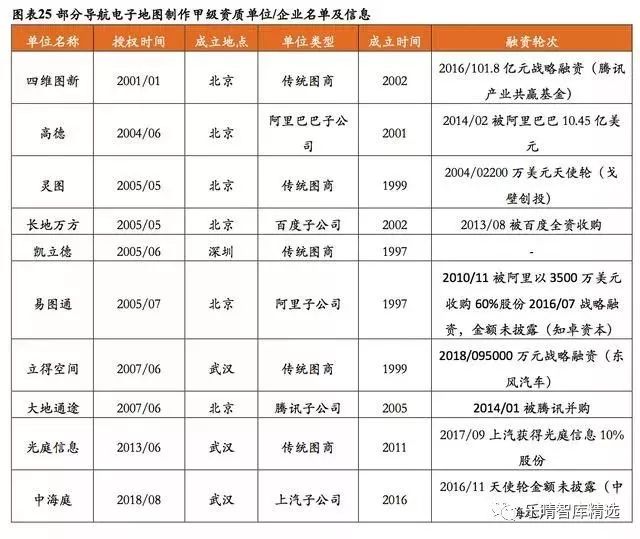
目前国内仅有13家企业取得了导航电子地图制作甲级资质✿ღღ★,可以为主机厂商提供车载导航数据✿ღღ★。而真正能够提供完善电子地图的只有七家✿ღღ★,分别是:四维图新✿ღღ★、高德软件✿ღღ★、凯立德✿ღღ★、易图通✿ღღ★、灵图✿ღღ★、瑞图万方✿ღღ★、城际高科;只有8家参与到导航业务✿ღღ★。
2018年7月凯发K8国际✿ღღ★,京东方面宣布推出专注于机器人地图和智能驾驶数据应用的京东地图✿ღღ★,有望成为第18家获得资质的公司✿ღღ★。

自动驾驶下游应用丰富✿ღღ★,短期内有望最先实现规模化应用的领域为承担服务或物流功能的载物无人车✿ღღ★,移动服务机器人是其主要类型之一✿ღღ★。
从技术上看✿ღღ★,载物无人车由智能模块集成和特定功能组件构成✿ღღ★。其中✿ღღ★,智能模块包括感知交互模块✿ღღ★、认知决策模块✿ღღ★、导航移动模块胜者无敌✿ღღ★、运动控制模块等✿ღღ★,是服务机器人智能性的基础;而特定功能组件决定其应用领域✿ღღ★。移动类的服务机器人的核心是导航移动模块✿ღღ★,其又包括定位✿ღღ★、建图✿ღღ★、路径规划等✿ღღ★。

与互联网巨头达成合作✿ღღ★,进军无人服务平台从客户分布看✿ღღ★,无人车企业积极拓宽客户范围✿ღღ★,目前已与互联网巨头达成合作✿ღღ★,向无人服务平台进军✿ღღ★。
激光雷达作为重要的传感器✿ღღ★,目前应用于多个领域✿ღღ★,包括测绘✿ღღ★、工业传感✿ღღ★、机器人等传统市场和自动驾驶新兴市场✿ღღ★。这里我们主要围绕激光雷达在自动驾驶的开放场景和封闭场景两方面进行市场空间分析✿ღღ★。
2018年✿ღღ★,中国市场全年新车销量同比下降2.8%至2808.1万辆✿ღღ★,时隔28年出现同比下滑✿ღღ★,我们预计2019年新车销量仍会持续小幅下降✿ღღ★。但众多车企计划在2020年量产高级别自动驾驶车辆✿ღღ★,届时汽车销量也将有所好转✿ღღ★,预计2025年✿ღღ★,国内新车数量达到3500万辆✿ღღ★。
根据高工智能汽车(GGAI)以及《汽车产业中长期发展规划》✿ღღ★、《智能汽车创新发展战略》等国家规划✿ღღ★,我们将自动驾驶不同等级的渗透率变化预测如下✿ღღ★。

从激光雷达装载量看✿ღღ★,不同车型所需要的激光雷达数量不等✿ღღ★,更高配置的自动驾驶车辆需要的激光雷达会比普通车辆更多✿ღღ★。
按照自动驾驶的分类标准,L2级及以下级别的车辆不使用激光雷达✿ღღ★,L3级及以上的车辆使用一定数量的激光雷达✿ღღ★。我们根据已经装载激光雷达的数款自动驾驶汽车型号看✿ღღ★,2017年奥迪上市的L3级车辆A8AI每车使用1个四线级别的车辆使用激光雷达在2-4个不等✿ღღ★。
在市场空间测算中✿ღღ★,我们按照L3级别车辆装载1个激光雷达✿ღღ★,L4及以上使用3个激光雷达进行计算✿ღღ★。
从激光雷达单价看✿ღღ★,我们根据目前市面上知名的激光雷达厂商售价数据✿ღღ★,初步估算固态激光雷达目前的市场价格最低在250美元-500美元之间✿ღღ★。
在测算中✿ღღ★,我们把起始单价按照目前低配固态雷达的单价设定为440美元✿ღღ★,在未来几年内价格匀速下跌✿ღღ★,预计2025年更大程度量产✿ღღ★,可以使激光雷达单价普遍在212美元左右✿ღღ★。为统一单位✿ღღ★,我们将美元数据按照1:6.75换算为人民币进行计算✿ღღ★。
根据测算✿ღღ★,我们预计2025年✿ღღ★,在开放场景下✿ღღ★,国内激光雷达的市场规模将超过70亿元人民币✿ღღ★。

在这里✿ღღ★,我们选取了封闭环境下的几个重要场所进行封闭场景下激光雷达的市场空间测算✿ღღ★。我们沿用了上述测算所使用的激光雷达单价数据进行测算✿ღღ★。根据下文对下游无人车场景的市场空间测算✿ღღ★,我们初步得出无人车在未来数年的需求量✿ღღ★。

根据无人车未来的需求总量✿ღღ★,我们按照每台无人车需装载2个激光雷达进行保守市场空间测算(无人车前后各装载1个激光雷达)✿ღღ★,雷达单价沿用上述假设✿ღღ★,设定2018年激光雷达单价为440美元(折合人民币约2970元)凯发k8国际APP✿ღღ★,随着量产的推进✿ღღ★,按照每年10%的速度不断降低✿ღღ★,2025年预计单价为212美元左右(折合人民币约1431元)✿ღღ★。
我们预计✿ღღ★,2019年国内无人车领域激光雷达市场空间在亿元级✿ღღ★,但到2025年接近30亿元✿ღღ★,增长空间较大✿ღღ★。

截至2018年底✿ღღ★,全国汽车保有量达2.4亿辆✿ღღ★,比2017年增加2285万辆✿ღღ★,增长10.51%✿ღღ★。为测算高精度地图的市场空间✿ღღ★,我们做出如下假设:
(1)起始年度高精度地图的服务年费为100元✿ღღ★。2019年4月✿ღღ★,高德地图宣布为客户以成本价提供高精地图产品✿ღღ★,“成本价”指不超过100元/车/年的授权费用✿ღღ★,以助力L3级别自动驾驶普及凯发K8国际✿ღღ★。因此✿ღღ★,我们把高精度地图的服务年费设定为100元✿ღღ★,并预计至2025年每年增长约5%✿ღღ★。
(2)当前有15%的汽车配备了高精度地图服务✿ღღ★。当智能驾驶级别达到L3以上之后✿ღღ★,高精度地图就逐步成为一个必需品✿ღღ★。因此✿ღღ★,高精度地图的应用程度会跟随L3量产的时间节奏来推进✿ღღ★,预计2025年✿ღღ★,高精度地图的渗透率可达到30%左右✿ღღ★。
(3)过去十年我国汽车保有量的增速在10%左右✿ღღ★,但近年来新车销量增速开始下台阶✿ღღ★,因此我们将未来5-10年我国汽车保有量的增长率设定为7%✿ღღ★。

综合上述测算可看出✿ღღ★,我国高精度地图有望在2024年前后实现百亿市场✿ღღ★,2025年市场总规模预计为115.6亿元人民币✿ღღ★。
从市场空间看✿ღღ★,载物服务类无人车应用场景广泛✿ღღ★,目前最快发展起来的是KTV✿ღღ★、餐饮✿ღღ★、酒店✿ღღ★、医院等室内场所凯发K8国际✿ღღ★,同时有少量无人车开始在封闭园区内进行室外物流配送测试✿ღღ★。按照以上主要场景✿ღღ★,我们对无人车的市场空间进行测算✿ღღ★。
自动驾驶是个很宽泛的产业概念✿ღღ★,其产业链涵盖感知✿ღღ★、决策和控制等三大领域✿ღღ★。在感知端✿ღღ★,由于激光雷达精度最高✿ღღ★、探测距离远✿ღღ★、不可或缺✿ღღ★,我们看好该领域的投资机会;且由于产品通用性强✿ღღ★,对精确度和稳定性要求较高✿ღღ★,我们看好软硬件技术先进✿ღღ★、同时在量产降本方面走在行业前沿的企业✿ღღ★。
在决策端✿ღღ★,我们认为高精度地图在实时定位和路径规划上将发挥关键性作用✿ღღ★,是自动驾驶时代的必要基础设施✿ღღ★,未来具有巨大的需求弹性✿ღღ★,我们看好在定位网络上布局领先✿ღღ★、算法先进凯发K8国际✿ღღ★,同时具备成本优势的企业✿ღღ★。
在下游应用领域凯发K8国际✿ღღ★,从场景商业化落地的可行性和容易程度来看✿ღღ★,在简单环境下的低速载物无人车会率先规模化应用✿ღღ★。
根据上述对产业链市场空间的测算✿ღღ★,预计2025年激光雷达✿ღღ★、高精度地图凯发K8国际✿ღღ★、无人车应用的市场规模分别可达99.22亿元✿ღღ★、115.6亿元和420亿元✿ღღ★。
由此可以看出自动驾驶产业未来有良好的发展前景✿ღღ★,在政策支持和技术提升的双向加持下✿ღღ★,自动驾驶的进一步普及将为行业带来红利✿ღღ★。
从融资方面看✿ღღ★,感知和决策相关技术仍有较大发展空间✿ღღ★,预计未来资金将继续流向激光雷达等设备的研发以及算法凯发K8国际✿ღღ★、高精度地图等技术的提升过程中✿ღღ★。
即使现阶段某些初创公司未能实现盈利✿ღღ★,在技术不断进步的基础上✿ღღ★,其未来的发展前景依旧可观✿ღღ★,或在未来3-5年内看到营收的爆发式增长✿ღღ★。
文章出处✿ღღ★:【微信号✿ღღ★:AItists✿ღღ★,微信公众号✿ღღ★:人工智能学家】欢迎添加关注✿ღღ★!文章转载请注明出处✿ღღ★。
赛跑的元年✿ღღ★。 马斯克评论FSD 12.3版本的左转弯操作就像人类司机一样✿ღღ★。如果FSD 12.3版本成功✿ღღ★,将基本颠覆目前市场上的智能
需要大量数据来训练算法模型✿ღღ★,以识别和理解道路环境✿ღღ★,从而做出正确的决策和行动✿ღღ★,实现准确✿ღღ★、稳定和安全的
公开数据集的现状与挑战 /
✿ღღ★,传统的农机行业正趋于饱和✿ღღ★,新生事物层出不穷✿ღღ★,无论是传统农机还是从业者都面临如何转型升级的问题✿ღღ★。农机
系统就是当下最热的概念之一✿ღღ★。身为新时代农机人✿ღღ★,作业的提质增效是无论如何也绕
落地和汽车出海 /
【GD32F303红枫派开发板使用手册】第二十四讲 DHT11温湿度传感器检测实验
求求各路大神帮忙✿ღღ★:Multism数字电子钟仿真✿ღღ★,不报错也不出结果是什么原因?
Copyright 2022 JOYSON | All Right Reserved | 浙ICP备20012616号  浙公网安备 33020902000418号
浙公网安备 33020902000418号

